Vision and echolocation
Moth do not like to fly in total darkness. We have found that from our early experiments when we had thoroughly hidden every shining LED of our equipment. In those conditions it was not easy to record any clicks: a moth could either fly silently or cease its flight soon after the experiment onset. But, provided with even a very low background illumination, moths were able to maintain steady flight for tens of minutes being tethered to our shift sensor.
From these observations we had supposed that there must be some interrelation between the visual and the echolocational systems. To address this question in experiment we have developed an original 'virtual reality device' adapted for our moths.
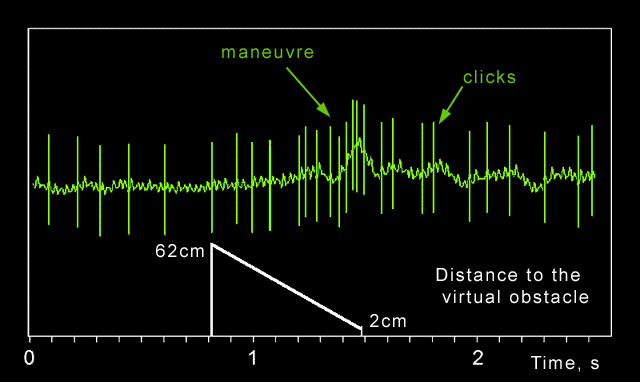
An image of approaching obstacle - that was a vertical bar, dark on a lighter background, imitating a trunk of a tree moving towards a moth - was projected to the flat screen before the moth. To project an image with a very high flicker rate we have used an oscilloscope which was able to give us 700 fps. The image (a signal to drive the oscilloscope) was generated by a computer equipped with custom-made video-adapter. The light intensity on the screen was set to imitate a full moon night (0.2 - 0.5 lux).